2026年3月12日、「製造ライン3Dシミュレーション開始前の環境構築の最適解」というセミナーが開催されました。 本記事では、その講演内容のポイントをご紹介します。
【登壇者:株式会社テクノプロ・コンストラクション ソリューション事業部 山本 靖司氏/bestat株式会社 事業推進部 部長 鶴見 卓也氏/株式会社テクノプロ テクノプロ・デザイン社 モビリティ統括部 真栄里 和也氏】
この記事で分かること
- 点群データの重量化・ノイズ・工程分断がシミュレーション前工程をボトルネック化する構造的原因
- 製造現場で図面不在・増改築による3D化工数が増大している背景と実態
- 3Dレーザースキャナー測量による±1mm精度の現況把握と、死角を補填する測量設計のポイント
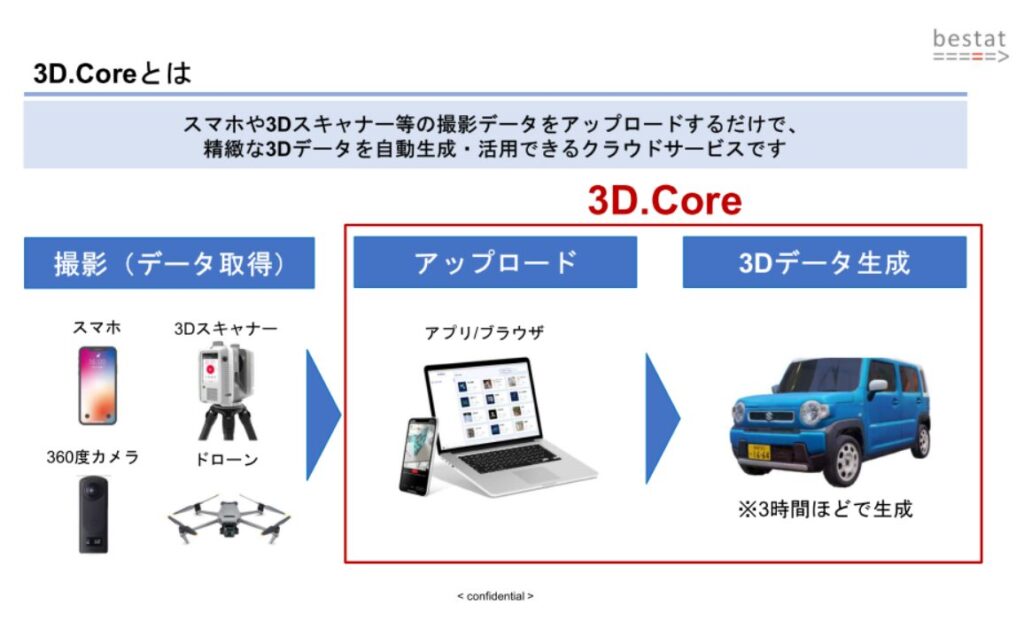
- AIクラウドサービス「3D.Core」が実現する点群の自動3D化・10分の1への軽量化プロセス
- NVIDIA Omniverse™を活用した異種データ統合による設備保全向けシミュレーションの活用アプローチ
図面がなく手戻りが多発──設備保全現場で3Dシミュレーション準備が進まない実態
はじめに、製造現場の設備保全領域において3Dシミュレーションの立ち上げが想定以上の工数を要している背景と、現場が直面している課題の実態を解説します。
製造現場で3Dシミュレーションやデジタルツインの活用が注目を集めています。搬入ルートの干渉チェックや保全スケジュールの最適化など、3D空間上で現況を再現して検証するニーズが広がっています。しかし、実際にシミュレーション環境を立ち上げようとすると、その前段階──現況の3Dデータを整備する工程──で想定以上の工数がかかるという声が多く聞かれます。
その背景には、1960年代・70年代・80年代といった高度成長期に建設された工場の多くで「元の図面がない」という現実があります。また、図面が存在していても、長年にわたる増改築の繰り返しにより、現況と図面の間に整合性がとれていないケースが多く報告されています。こうした状況では、現況を正確に把握するための3Dデータ生成に膨大な工数がかかることが課題となっています。
点群データの重量化・ノイズ・工程分断──シミュレーション前工程がボトルネックになる構造的原因
次に、測量・図面整理・3D化・精度調整と工程が分断されやすい構造と、「重くて使えない」「ノイズ除去・切り出しに時間がかかる」といった点群データ特有の問題がなぜ手戻りを生むのかを明らかにします。
3Dシミュレーションに向けた前工程は、測量設計・現地計測・データ生成(前処理)・3Dモデリングと複数の工程に分かれています。測量設計の段階でスキャン位置や死角の有無を正しく設計しなければ、後工程で「データが足りない」「精度が出ない」といった問題が発覚し、手戻りが発生します。
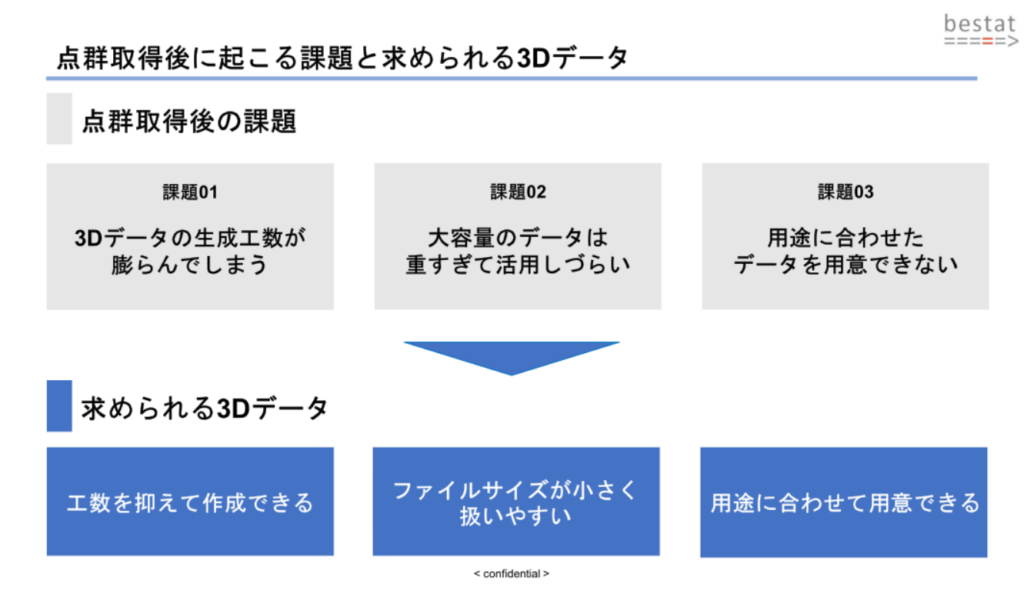
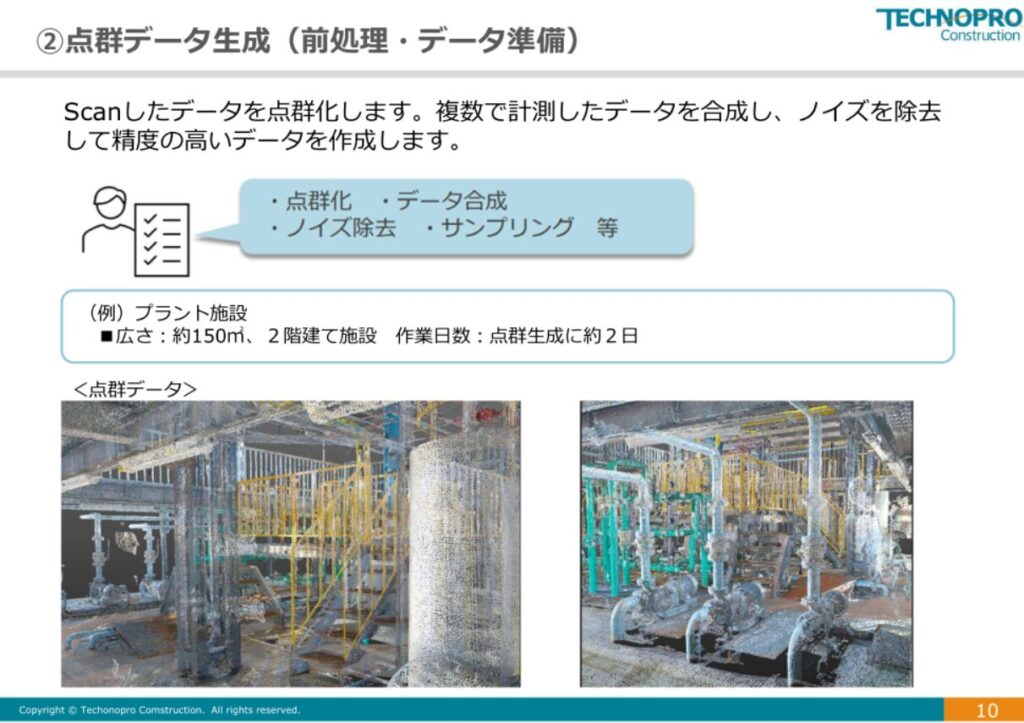
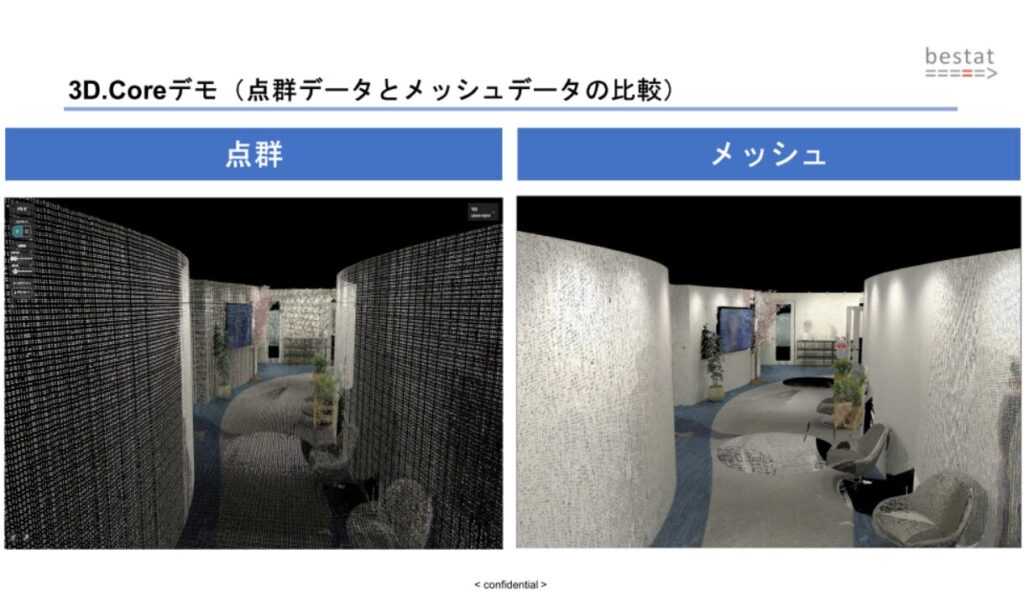
加えて、3Dレーザースキャナーで取得した点群データは情報量が膨大で、数テラバイト規模に達することもあります。現場からは「重くて使えない」「ノイズ除去や必要部位の切り出しに時間がかかる」という声が上がっています。点群データには構造物だけでなく、ラックや段ボールなど計測対象外の物体もノイズとして含まれるため、これらを除去してクリーンなデータに整える工程が不可欠です。
こうした前処理工程に時間がかかることで、シミュレーション環境の立ち上げまでに大きな工数を要する構造になっています。
点群測量×AI自動3D化×Omniverse™連携──デジタルツイン構築を一気通貫で実現する3ステップ
続いて、3Dレーザースキャナーによる高精度な点群取得、AIクラウドサービス「3D.Core」による自動3Dモデル生成・軽量化、そしてNVIDIA Omniverse™を使った統合シミュレーション環境の構築まで、一気通貫のアプローチを示します。
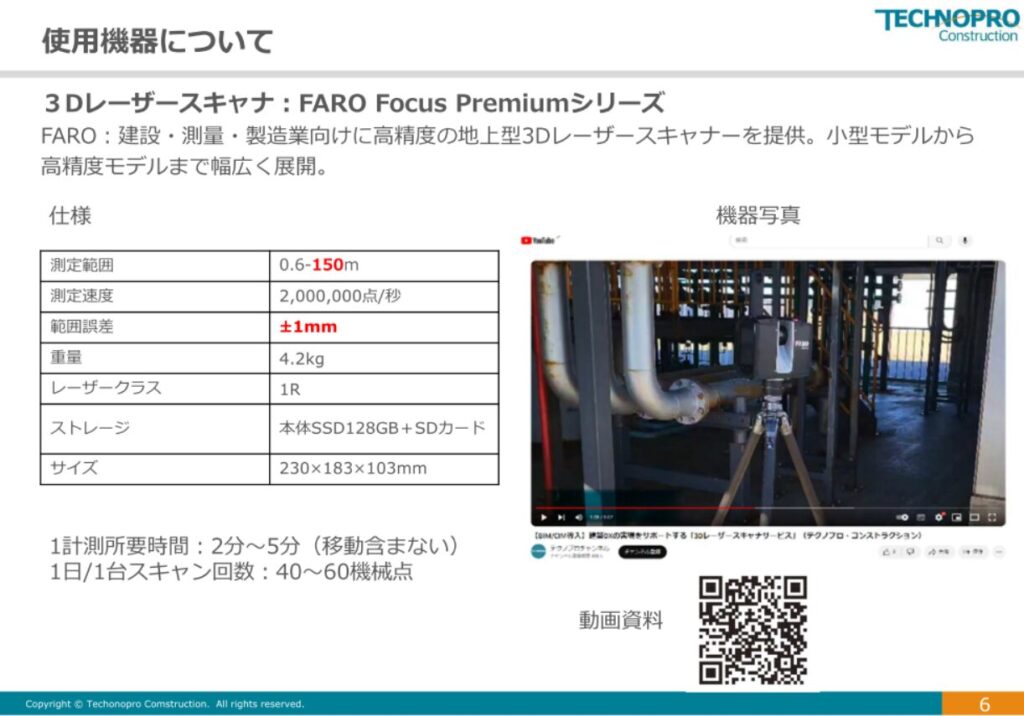
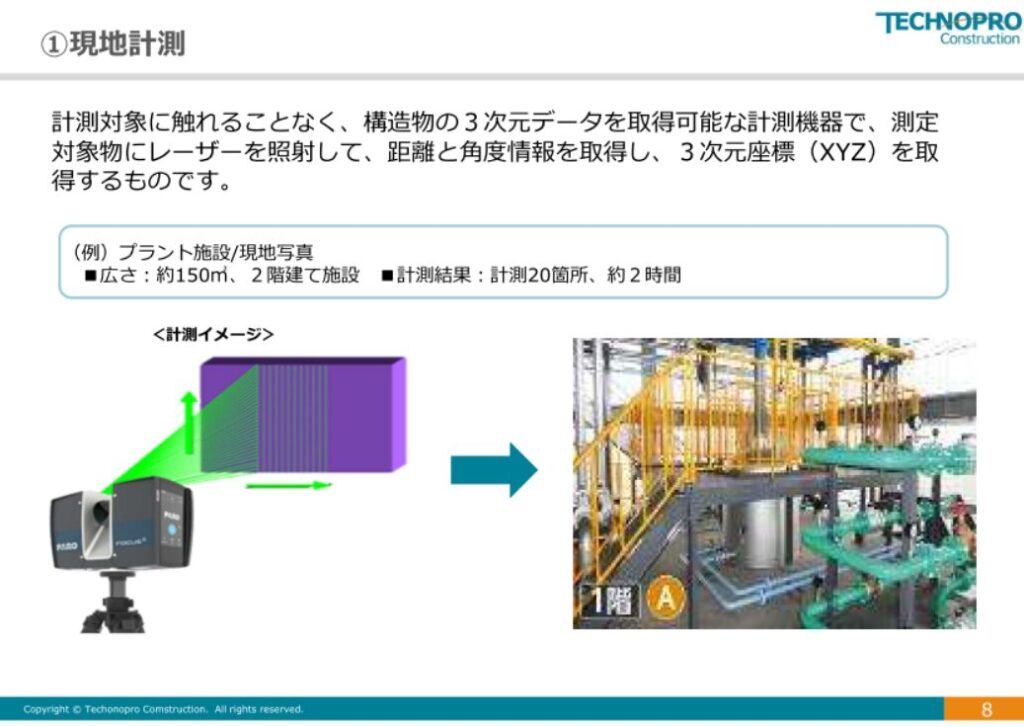
第1ステップは、株式会社テクノプロ・コンストラクションが担う高精度な点群取得です。使用するFARO Focus Premiumシリーズは、測定範囲150m、測定誤差±1mmという高精度を備えています。1箇所のスキャンは2分から5分で完了し、機器を数メートル間隔で移動させながらレーザーを360度照射することで、広範囲の空間情報を「面」として取得できます。レーザーが届かない死角にはハンディスキャナーや小型ドローンを組み合わせて補填します。例として、面積150㎡の2階建て施設では、現地計測と点群データの前処理を合わせて約2日で完了しています。
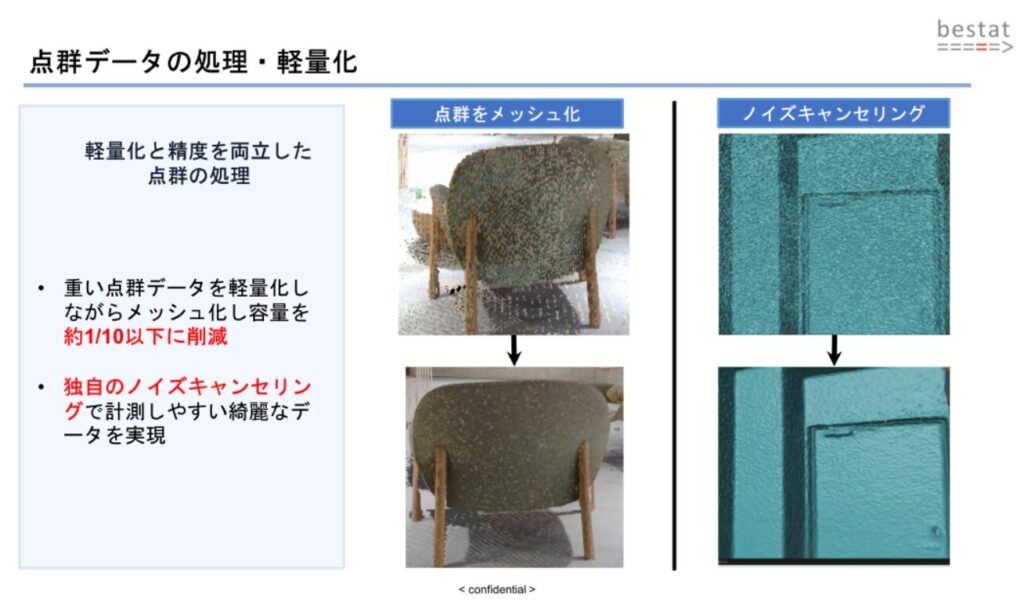
第2ステップは、bestat株式会社が提供するAIクラウドサービス「3D.Core」による自動3Dモデル生成です。bestat株式会社は東京大学松尾研究室発のAIスタートアップで、独自の特許取得済みアルゴリズムを強みとしています。3D.Coreでは、スマートフォンや3Dスキャナーで取得したデータをクラウドにアップロードするだけで、AIが自動的に3Dメッシュモデルを生成します。
この過程で、元の点群データから容量を10分の1以下に軽量化しながら、独自のノイズキャンセリング技術によりエッジや面がはっきりしたクリーンなデータに仕上げます。iPhone ProのLiDARカメラを用いた場合の精度は誤差1%以内で、手軽なデバイスでも実用レベルのデータを取得できます。さらに、2D図面や画像からチャット形式でAIと対話しながら3Dモデルを生成する「3D.Core CAD Agent」も提供されています。
第3ステップは、NVIDIA Omniverse™を活用した統合シミュレーション環境の構築です。Omniverse™は、生産シミュレーションそのものを行うツールというよりも、異なる3Dデータや工程データをツールの垣根を越えて同じ場所で同期検証できる「統合環境」として位置づけられています。工場レイアウトの検討やライン設計、個別設備の挙動解析など、目的別に分かれているシミュレーション結果をOmniverse™上で統合することで、全体最適の視点から検証が可能になります。統合されたデータは設備保全の領域にも展開でき、不具合発生の予測シミュレーションや保全スケジュールの最適化にも活用できます。
なお、テクノプロ・グループでは2026年3月に株式会社テクノプロ コンサルティング・パートナーズ社を設立しています。同社はグループ内のオフサイト型ソリューションを集約した新組織であり、産業メタバースの企画・開発を推進しています。
PoCで終わらせないために──設備保全業務に実装可能な3Dシミュレーション基盤の構築へ
最後に、点群測量からデジタルツイン環境整備までの一気通貫アプローチにより、PoCにとどまらず設備保全業務に実装できる3Dシミュレーション基盤をどう構築するかを整理します。
ここまで紹介した測量→AI自動3D化→Omniverse™統合という一連の流れにより、従来は工程ごとに分断されていたシミュレーション準備を効率化し、工数を削減することが可能になります。ポイントは、既存のシミュレーションツールを一気に置き換えるのではなく、Omniverse™を統合検証環境として併用しながら段階的にデジタルツイン環境へ移行するアプローチです。まずはPoCとして限定的な範囲で検証を行い、効果を確認しながら適用範囲を拡大していくことで、現場に根づいた運用が可能になります。テクノプロ・グループでは、点群測量からデータ生成、シミュレーション環境構築までの技術検証・PoC・実装を一気通貫で支援する体制を整えています。
よくある質問
Q1. 医薬工場のサニタリー配管(表面光沢のある配管)にも3D.Coreは適用できますか?
A. 条件付きで適用可能です。表面の反射が強い場合はデータ取得が困難になることがありますが、照明の明るさを調整して反射を抑えることで対応できます。事前の環境整備が重要なポイントになります。
Q2. iPhoneのLiDARカメラと3Dレーザースキャナーでは、点群データの精度にどのくらい差がありますか?
A. iPhone ProのLiDARカメラでは誤差1%以内(100cmの対象物で99〜101cm程度)の精度になります。一方、3Dレーザースキャナー(FARO Focus Premium等)では誤差±1mm(数ミリ単位)の精度が得られます。ミリ単位の厳密な精度が求められる場合は3Dスキャナーが適しており、用途に応じた使い分けが推奨されます。
Q3. 土砂の山などの体積測定にも活用することはできますか?
A. 基本的には活用可能です。10cm程度の粗さの精度であれば、PoCを通じて実現可能性を検証できます。
Q4. 既存のシミュレーションツールとNVIDIA Omniverse™はどのように併用できますか?
A. Omniverse™は既存のシミュレーションツールを置き換えるものではなく、異なるツールで作成された3Dデータや工程データを統合し、同じ環境上で同期検証するための「統合環境」として活用できます。既存のワークフローを維持しながら、段階的に統合検証環境を構築するアプローチが推奨されています。
Q5. 3D.Coreはクラウドのみですか?オンプレミスでの利用はできますか?
A. 標準提供はクラウドサービスですが、個別相談によりオンプレミスでの利用も検討可能です。
Q6. 一度に扱える3Dモデルの大きさやデータ量にはどの程度の目安がありますか?
A. 理論上の制限は設けられていません。過去には1km四方程度の点群データを3D化した実績もあります。処理時間の目安として、100m四方のデータであれば3〜4時間から半日程度で完了します。