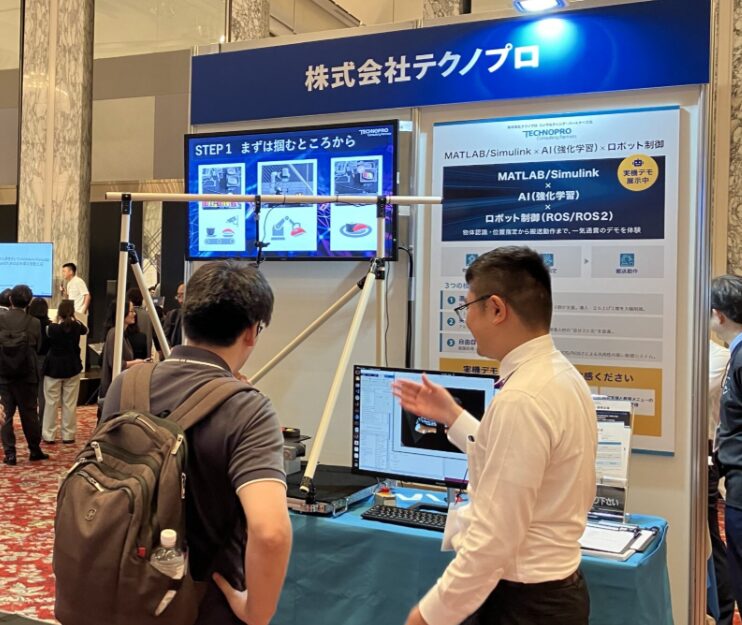
2026年5月26日、MathWorks社主催のMATLAB EXPO 2026 Japan が開催され、会場ではMATLAB/Simulinkなどの最新動向や活用方法が紹介されました。テクノプロはパートナーとして参加し、MATLAB/Simulinkを活用したROS/ROS2とAIによるロボットアームの自律制御についてご案内しました。
本記事では、デモンストレーションの概要と未来像についてご紹介します。
この記事で分かること
- 展示会で紹介された ROS/ROS2 × 強化学習 × MATLAB/Simulink の展示内容
- MATLAB/Simulink を活用することで期待できる導入効果
- 4足歩行ロボットの強化学習デモが示していた実務的な示唆
- 自律制御や強化学習を PoC で終わらせず、現場実装につなげるための考え方
まずは展示内容をご紹介──ROS/ROS2×強化学習×MATLAB/Simulinkで何を示したのか
今回の展示では、MATLAB/Simulink × AI(強化学習)× ロボット制御(ROS/ROS2) を軸に、自律制御開発をどう前に進めるかというテーマが紹介されました。単に「強化学習ができます」と見せるのではなく、物体認識・位置推定から軌道計画まで、一連の流れを踏まえた実装イメージ を提示していた点が特徴です。会場では実機デモも交えながら、ROS/ROS2 を活用したロボット制御の実装可能性が訴求されていました。 展示テーマとして分かりやすかったのは、「自律制御の実現には、アルゴリズム単体ではなく、開発環境全体の設計が重要である」 というメッセージです。制御対象の定義、学習環境の整備、評価方法の設計、実機展開までを分断せずに考える必要があることが、展示内容全体を通じて示されていました。
MATLAB/Simulinkの導入効果──設定工数の低減から解析・可視化までを一気通貫で
展示資料の中で明確に訴求されていたのが、MATLAB/Simulink を活用することで、強化学習段階の各種設定工数を抑え、実機破損リスクを最小化し、さらに学習結果の解析・検証・可視化までを一貫して進めやすくなる という点です。ここはかなり本質的です。派手に見えるのは最終的な挙動ですが、現場で効くのはむしろ、その手前です。
強化学習は、報酬設計やパラメータ設定次第で結果が大きく変わります。つまり、アルゴリズムの精度以前に、どのような条件で学習させ、どう評価し、どう改善につなげるか が重要になります。MATLAB/Simulink を使う価値は、この工程を個別最適ではなく、開発プロセスとしてつなげやすくする点にあります。学習結果を可視化できることは、技術者同士の議論だけでなく、社内の合意形成にも効きます。
言い換えると、MATLAB/Simulink の導入効果は「強化学習ができること」そのものではありません。強化学習を、現場で扱える開発テーマに変えられること。ここに価値があります。
応用編:4足歩行ロボットの強化学習デモが示していたこと
今回の展示で印象的だったのが、4足歩行ロボットを題材にした強化学習デモ です。資料では、学習前の状態では 15cm の段差を 7段登りきることができない 一方で、強化学習の結果として 階段を登りきれるようになる 様子が示されていました。
このデモが優れているのは、単に「AIで制御できました」と見せているのではない点です。重要なのは、学習によって挙動がどのように改善されたのか が、開発担当者の目線で理解しやすいことです。学習前には段差環境で歩行に失敗していたものが、地形や姿勢の学習を通じて、段差走破という具体的な成果につながる。この変化が見えるからこそ、強化学習を“現実の改善手段”として捉えやすくなります。
つまり、この展示デモが示していたのは、「学習できること」ではなく「改善できること」 です。技術デモで終わるか、現場導入のヒントになるかの差は、ここにあります。
自律制御や強化学習への関心は高いのに、現場実装が進みにくい理由
ロボティクスや制御開発の現場では、ROS/ROS2 をベースにした自律制御や、強化学習を活用した高度な挙動生成への関心が高まっています。歩行、把持、移動、姿勢制御といったテーマに対して、従来のルールベースでは扱いにくかった課題を突破できる可能性があるからです。一方で、導入段階では「環境づくりが重い」「実機で試すにはリスクが高い」「結果の妥当性をどう判断すべきか分からない」といった壁にぶつかりやすいのも事実です。
要するに、止まりやすい原因は“技術が難しいから”だけではありません。
設定、学習、評価、実機展開が分断されやすいこと が、導入を難しくしています。だからこそ、展示内容でも強調されていたように、学習前後を含めた開発環境の整備が重要になります。
PoCで終わらせないために──現場実装につなげる進め方
自律制御や強化学習のテーマは、PoCまでは進んでも、その先で止まることが少なくありません。理由は明快で、検証環境、評価指標、実機展開条件が揃わないまま、“成功っぽい結果”だけが先に出てしまうからです。ここから必要なのは、「できたかどうか」ではなく、繰り返し使える仕組みとして成立するかどうか です。
テクノプロは MATLAB/Simulink を利用した ROS/ROS2 の強化学習環境構築 に加え、技術者向け学習支援 にも対応いたします。つまり、導入検討、環境整備、学習支援まで一気通貫で考えられる体制が前提になっています。PoCで拍手をもらうより、現場で定着させるほうが難しい。だからこそ、MATLAB/Simulinkにまつわる課題解決には、様々なご要望に柔軟に対応可能なテクノプロにご相談下さい。
今回展示会場でご紹介したフィジカルAIのデモ動画をご用意いたしました。
MATLAB/Simulinkを活用したフィジカルAIコンセプトデモ紹介
よくある質問
Q1. ROS1 と ROS2 は、どちらを前提に考えるべきですか?
A. 一般に新規開発では ROS2 が有力な選択肢になりやすい一方で、既存資産や運用環境との整合も重要です。ROS/ROS2 の違いを押さえたうえで、現場の開発資産や今後の拡張性を踏まえて判断するのが現実的です。
Q2. いきなり実機で強化学習を始めるべきですか?
A. 展示内容から見ても、実機破損リスクの最小化は大きな論点です。まずはシミュレーション上で設定、学習、解析、評価を進め、実機は段階的な確認フェーズとして扱うほうが安全です。
Q3. 強化学習で最初に難しいのは何ですか?
A. 技術そのものよりも、何を学習させたいのかという課題定義と、それに対応する環境設計、評価の考え方が難所になりやすいです。報酬設計や検証条件が曖昧だと、学習しても現場で使える結果になりにくくなります。
Q4. 学習結果は何をもって“良い”と判断すべきですか?
A. タスク達成だけでなく、再現性、安定性、環境変化への強さ、そして結果を説明できるかどうかも重要です。展示資料でも、解析・検証・可視化までを一貫して行えることが価値として示されています。
Q5. 情報収集から相談したい場合、どこを見ればいいですか?
A. まずはシミュレーション開発の全体像を整理できるスタートガイドや、ROSの基礎記事から入るのが自然です。テーマが具現化している場合は、本サイトのお問い合わせフォームからお問い合わせいただくのがスムーズです。